Sistemi Lidar: Principi di funzionamento e applicazioni in Edilizia

La tecnologia LiDAR sta trasformando il settore dell'edilizia grazie alla sua capacità di fornire mappe tridimensionali dettagliate e precise. Utilizzando impulsi di luce laser per misurare distanze e creare modelli 3D accurati, LiDAR è diventato uno strumento indispensabile per ingegneri, architetti e geometri. Questo articolo esplora le principali applicazioni nell'edilizia, illustrando come questa innovazione possa migliorare la progettazione, l'analisi strutturale e la pianificazione dei progetti.
Cos'è la tecnologia LiDAR
Con l'acronimo LiDAR, il cui significato è Light Detection And Ranging, si indica una tecnologia in grado di misurare la distanza e la posizione di un oggetto illuminandolo con una luce laser. Si tratta di un'innovazione determinante nel campo del telerilevamento, poiché riesce a fornire una vasta gamma di informazioni tridimensionali ad alta risoluzione su tutto l'ambiente circostante. Prima di passare a spiegarne il funzionamento vero e proprio, ecco un elenco di quelli che generalmente sono i componenti di un sistema Lidar:
- un laser, che emette impulsi di luce.
- dei fotorilevatori, che rilevano la luce riflessa.
- il ROIC (Readout Integrated Circuit), che misura il tempo di ritorno della luce.
- un'unità di elaborazione che elabora i dati e crea mappe 3D.
- un sistema di scansione, che muove il raggio laser per coprire l'area.
- GPS e IMU che forniscono dati di posizione e orientamento.
Questo metodo permette di creare mappe tridimensionali dettagliate dell'ambiente, utili in molteplici applicazioni, dall'archeologia alla guida autonoma, dalla topografia all'agricoltura di precisione.
Come funziona un sistema LiDAR
In generale, il funzionamento di un sistema Lidar non è tanto diverso da quello di un Radar o di un Sonar ma, al posto di utilizzare le onde radio o le onde sonore, il segnale utilizzato è la luce pulsata. Più nello specifico, applicando principio dell'eco, questo sistema misura il tempo impiegato dalla luce per tornare al sensore e in base a ciò calcola la distanza di un oggetto o l'estensione di una determinata superficie. La tecnologia si basa sul fatto che la velocità di propagazione della luce è costante, circa 300.000 km/s. Questo permette di calcolare facilmente il cosiddetto tempo di volo, o Time of Flight (ToF), impiegato da un raggio luminoso per andare da una sorgente verso un bersaglio riflettente e tornare indietro verso il rilevatore posto accanto alla sorgente stessa.
Usando questo metodo, la distanza può essere calcolata moltiplicando il tempo di volo per la velocità della luce e poi dividendo per due, poiché il raggio laser deve percorrere la distanza due volte (andata e ritorno).
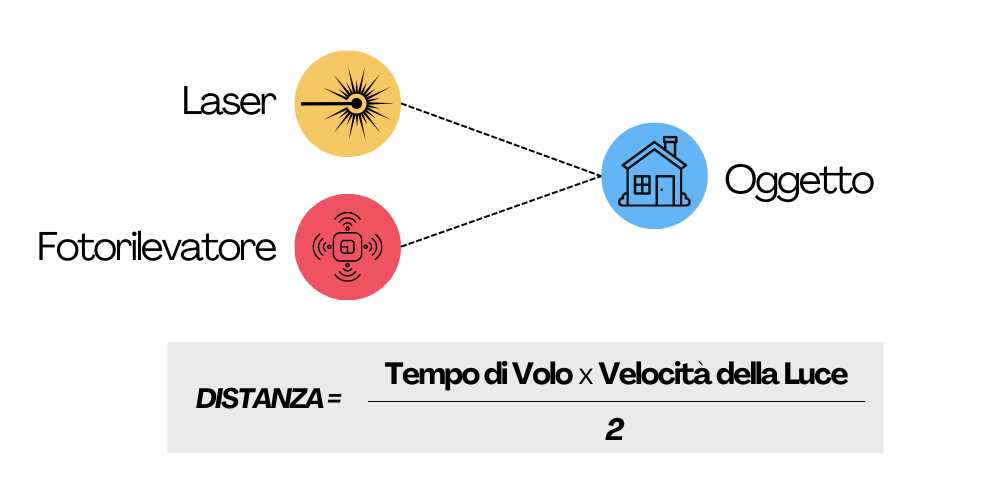
Supponiamo ad esempio che, per tornare al fotorilevatore, l'impulso laser impieghi 80 nanosecondi (0,000000080 secondi). Moltiplicando questo valore per la velocità costante (300.000.000m/s) si ottiene una distanza totale, comprensiva di andata e ritorno, di 24 metri. Dividendo questo valore per 2, otterremo la distanza effettiva del punto misurato, ovvero 12 metri.
Principio di Misura: Tempo di Volo (Time of Flight, ToF)
Di seguito un riepilogo del principio di misurazione basato sul Time of Flight, per fornirvi un quadro chiaro di come funziona il telerilevamento tramite Lidar dall'emissione dell'impulso all'elaborazione digitale.
| 1. Emissione dell'impulso laser | Il sistema LiDAR emette, verso un bersaglio, un impulso di luce laser estremamente breve, con durate tipiche nell'ordine dei nanosecondi. |
|---|---|
| 2. Riflessione dell'Impulso | L'impulso laser viaggia attraverso l'aria fino a colpire un oggetto o una superficie riflettente e la luce riflessa ritorna verso il sistema LiDAR. |
| 3. Rilevamento della Luce Riflessa | La luce riflessa viene catturata da fotorilevatori che convertono i fotoni di ritorno in segnali elettrici analizzabili. |
| 4. Calcolo del Tempo di Volo (ToF) | Il tempo impiegato dalla luce per viaggiare fino al bersaglio e tornare indietro è misurato dal circuito integrato di lettura (ROIC). |
| 5. Scansione dell'Area | Per coprire un'area più ampia, il sistema utilizza un meccanismo di scansione, come uno specchio oscillante o una piattaforma rotante, per dirigere il raggio laser in diverse direzioni e creare una mappa 3D. |
| 6. Generazione della Nuvola di Punti 3D | I dati elaborati vengono combinati con i rilevamenti GPS e IMU, generando una nuvola di punti 3D, dove ogni punto rappresenta una distanza misurata dal sensore LiDAR all'oggetto nell'ambiente. |
| 7. Elaborazione Digitale | La nuvola di punti può essere ulteriormente elaborata per identificare oggetti fissi o in movimento, oppure per ricostruire fedelmente le superfici dell'ambiente circostante. |
Le Tipologie di Sistemi LiDAR
Spostiamoci ora sul lato un po' più tecnico! Pur condividendo il principio di funzionamento generale, esistono due diverse tipologie di sistema lidar:
- sistemi che usano la scansione meccanica;
- sistemi che usano la tecnologia flash.
Nella tipologia a scansione meccanica, un sensore LiDAR ruota fisicamente il laser e il ricevitore a 360° per ottenere una visione molto ampia. Questo può essere realizzato in due modi:
| Movimento Meccanico | L'emettitore e il rilevatore di luce vengono ruotati o mossi fisicamente lungo gli assi cartesiani. |
|---|---|
| Microspecchi MEMS | Utilizzano microspecchi comandabili per dirigere il fascio laser senza muovere fisicamente il dispositivo. |
Il campo visivo di un sensore LiDAR a scansione è determinato dai gradi di libertà e dagli eventuali vincoli di movimento del sistema meccanico o MEMS di scansione.
La tecnologia Flash LiDAR, invece, non prevede alcuna parte o componente in movimento, funzionando in modo simile a una fotografia istantanea. Il campo visivo di un sensore Flash LiDAR è determinato principalmente dalle caratteristiche dell'ottica che emette e riceve il fascio di luce.
Per fornire una panoramica più ampia di queste due tipologie di sistemi, abbiamo realizzato questa tabella comparativa:
| Caratteristica | Scansione Meccanica | Tecnologia Flash LiDAR |
|---|---|---|
| Principio di Funzionamento | Rotazione fisica del laser e del ricevitore a 360° | Emissione e rilevamento di impulsi di luce senza movimenti |
| Componenti in Movimento | Sì (emettitore e rilevatore o microspecchi MEMS) | No |
| Campo Visivo | Determinato dai gradi di libertà del sistema di scansione | Determinato dalle caratteristiche dell'ottica |
| Risoluzione | Variabile, alta risoluzione grazie alla scansione fine | Generalmente più bassa rispetto alla scansione meccanica |
| Velocità di Acquisizione | Relativamente lenta, dipende dalla velocità di scansione | Elevata, acquisizione istantanea |
| Complessità del Sistema | Alta, richiede componenti meccanici complessi | Minore, senza parti in movimento |
| Costo | Generalmente più alto | Generalmente più basso |
| Interferenze | Sensibile a vibrazioni e shock meccanici | Meno sensibile a interferenze meccaniche |
| Durata e Affidabilità | Potenzialmente minore a causa di componenti mobili | Maggiore affidabilità e durata |
| Esempi di Utilizzo | Automobili autonome, mappatura 3D di alta precisione | Sensori per applicazioni industriali e robotiche |
| Tecnologie di Rivelazione | Fotodiodi PIN, fotodiodi a valanga (APD), SPAD, SiPM | Fotodiodi PIN, fotodiodi a valanga (APD), SPAD, SiPM |
| Applicazioni Ideali | Mappature dettagliate, rilevamenti ambientali | Applicazioni che richiedono acquisizioni rapide e meno dettagliate |
Quattro Tipologie di Rivelatori LiDAR
Abbiamo visto che, entrambe le tipologie di sistemi Lidar, utilizzano le stesse tipologie di rivelatore. In effetti, esistono quattro principali tecnologie a semiconduttore utilizzate per realizzare rivelatori per sensori LiDAR, ecco qualche informazione su di loro:
| Fotodiodi PIN | Questi dispositivi sono semplici fotodiodi che rilevano la luce e convertendola in corrente elettrica. Sono utilizzati per la loro robustezza e semplicità. |
|---|---|
| Fotodiodi a Valanga (APD) | I fotodiodi a valanga amplificano la corrente generata dai fotoni incidenti attraverso un processo di moltiplicazione a valanga, migliorando la sensibilità e la capacità di rilevare deboli segnali di luce. |
| Diodi a Valanga a Singolo Fotone (SPAD) | Questi rivelatori sono estremamente sensibili e in grado di rilevare singoli fotoni. Sono ideali per applicazioni che richiedono alta precisione e tempi di risposta rapidi. |
| Fotomoltiplicatori al Silicio (SiPM) | I SiPM sono rivelatori altamente sensibili che combinano le caratteristiche dei fotomoltiplicatori tradizionali con le tecnologie a semiconduttore. Offrono un'elevata efficienza di rilevamento e possono lavorare in condizioni di bassa luminosità. |
La nuvola di punti LiDAR
Vediamo ora cosa si intende per nuvola di punti. In ambito LiDAR, si tratta di una rappresentazione dettagliata dell'ambiente circostante, o di un oggetto, ottenuta tramite il meccanismo di telerilevamento appena descritto. Ogni punto nella nuvola rappresenta una misurazione individuale della distanza tra il sensore LiDAR e un oggetto nella scena. Questa nuvola di punti può essere trasformata in un mesh attraverso algoritmi che connettono i punti vicini per formare vertici, bordi e facce.
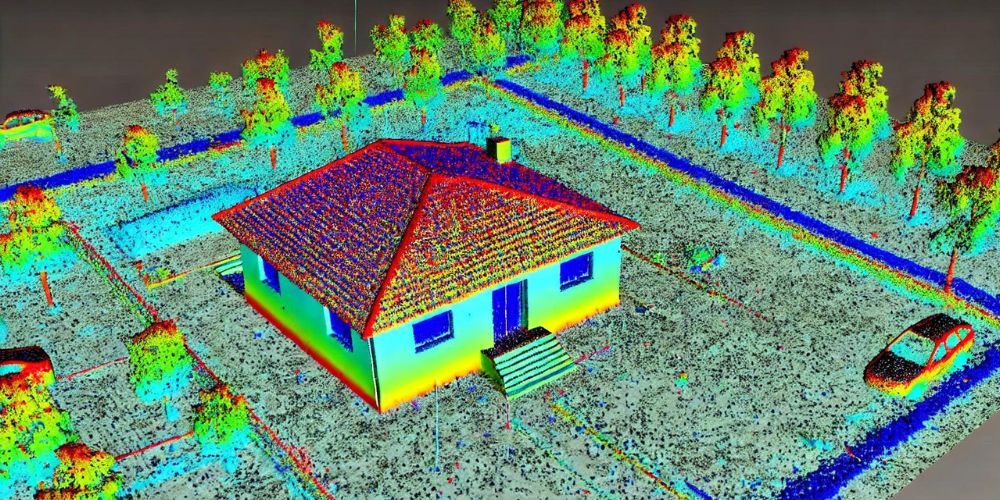 (Immagine rappresentativa di una nuvola di punti Lidar generata dalla scansione di un'abitazione)
(Immagine rappresentativa di una nuvola di punti Lidar generata dalla scansione di un'abitazione)
Una nuvola di punti può avere una densità molto elevata, con milioni di punti che rappresentano dettagli fini dell'ambiente. La densità dipende dalla risoluzione del sistema LiDAR e dalla distanza dell'oggetto rilevato. Ogni punto nella nuvola ha coordinate tridimensionali (x, y, z) che indicano la posizione nello spazio. Queste coordinate sono calcolate utilizzando il tempo di volo della luce laser riflessa dagli oggetti. Inoltre, alcuni sistemi LiDAR catturano anche informazioni sull'intensità del segnale riflesso, che può essere utile per distinguere materiali diversi o per migliorare la visualizzazione. Anche il colore è un fattore determinante, in alcune applicazioni, infatti, la nuvola di punti può essere combinata con dati RGB (colore) ottenuti da fotocamere sincronizzate con il sistema LiDAR. Questo crea una rappresentazione colorata che facilita l'interpretazione visiva. Una nuvola di punti LiDAR viene tipicamente visualizzata utilizzando software specializzati che permettono di esplorare e analizzare i dati 3D.
Software consigliati per i sistemi Lidar
Fra poco esploreremo le principali applicazioni del LiDAR in edilizia, ma prima è doveroso citare dei software che non possono mancare nel compedio degli strumenti digitali di un tecnico che si rispetti. Li abbiamo scelti considerando la capacità di integrare i dati con processi di progettazione architettonica e ingegneristica, nonché la facilità d'uso e la compatibilità con altri strumenti CAD e BIM. Ecco i 3 migliori software secondo noi:
- ReCap (Reality Capture) di Autodesk, uno dei software più utilizzati per trasformare i dati di scansione laser e fotogrammetria in modelli 3D dettagliati e utilizzabili.
- RealWorks di Trimble, un software robusto per l'elaborazione delle nuvole di punti progettato per supportare scanner laser 3D.
- Cyclone di Leica Geosystems, una piattaforma completa per l'elaborazione e la gestione delle nuvole di punti, nota per la sua robustezza e precisione.
Applicazioni dei Sistemi Lidar in Edilizia
Ecco alcuni esempi concreti di applicazioni del LiDAR in edilizia che possono interessare ingegneri, architetti e geometri:
- realizzare mappature 3D dettagliate del terreno e delle superfici, utilizzare queste mappe per analizzare le caratteristiche del terreno prima della costruzione, identificare potenziali problemi di drenaggio e pianificare movimenti di terra con precisione;
- effettuare rilievi topografici rapidi e accurati, catturando dati su vaste aree con alta risoluzione, per creare planimetrie dettagliate del sito di costruzione, essenziali per la progettazione e la pianificazione urbanistica;
- monitorare la stabilità delle strutture esistenti, rilevando spostamenti o deformazioni nel tempo, per valutare la sicurezza delle strutture, pianificare interventi di manutenzione e prevenire cedimenti strutturali;
- ricreare modelli 3D di edifici storici, che possono essere utilizzati per restaurare edifici storici mantenendo l'integrità architettonica originale, o per integrare nuove costruzioni armoniosamente con le strutture esistenti;
- pianificare progetti di infrastrutture come strade, ponti o gallerie, ottimizzando queste opere di ingegneria civile sia dal punto di vista dei costi che da quello dell'impatto ambientale;
- mappare corsi d'acqua e zone di drenaggio, per ottimizzare la gestione delle risorse idriche, progettare sistemi più efficienti e mitigare il rischio di alluvioni;
- progettare parchi e spazi verdi che si integrino naturalmente con l'ambiente esistente, migliorando l'estetica e la funzionalità del verde urbano;
- ispezionare le facciate degli edifici, rilevando crepe, distacchi o altre problematiche, per poi pianificare interventi di manutenzione e riparazione, garantendo la sicurezza e l'integrità delle strutture;
- incrementare la precisione e la completezza dei modelli BIM, contribuendo a ridurre gli errori di costruzione e migliorare l'efficienza del processo di progettazione.
La formazione sui sistemi LiDAR
Per approfondire le tue competenze nell'utilizzo della tecnologia LiDAR in edilizia, Pedago offre un Corso di Rilievo con LiDAR. Questo corso fornisce una formazione completa sulle tecniche di acquisizione, elaborazione e analisi dei dati LiDAR, coprendo l'intero processo, dai rilievi con drone e strumenti terrestri fino alla generazione di modelli digitali del terreno (DEM/DTM), curve di livello e sezioni. Attraverso un approccio pratico, imparerai a pianificare rilievi efficienti, ottimizzare la raccolta dati e applicare le migliori strategie di post-processing, inclusa la gestione delle strisciate, il filtraggio del rumore e la classificazione delle nuvole di punti. Il corso è ideale per professionisti che desiderano migliorare la qualità e l'affidabilità dei loro rilievi utilizzando tecnologie all'avanguardia. Al termine, sarai in grado di gestire l'intero processo di rilievo, dalla pianificazione alla produzione di modelli digitali del terreno, applicabili in topografia, ingegneria civile, monitoraggio ambientale e pianificazione urbana. Per maggiori dettagli e per iscriverti, visita la pagina del corso.
 Corso Addetto alle Gare d'Appalto
Corso Addetto alle Gare d'Appalto
 Corso Cyber Security
Corso Cyber Security
 Corso Aggiornamento per Coordinatore della Sicurezza di 40 ore
Corso Aggiornamento per Coordinatore della Sicurezza di 40 ore
 Corso Docfa 4.00.5: Gestione delle pratiche catastali
Corso Docfa 4.00.5: Gestione delle pratiche catastali
 Corso CTU e CTP: operazioni peritali in tribunale
Corso CTU e CTP: operazioni peritali in tribunale